
无信号灯交叉口左转
城市道路环境-无信号灯平面交叉口
测试自动驾驶汽车在无信号灯的交叉路口行驶,能否及时识别存在路径冲突的行人、非机动车或参考车,通过获取交通目标的距离、速度信息调整自身的速度,避免与行人、非机动车或参考车发生碰撞,以确保自动驾驶汽车行驶时自车的安全。
测试道路为无信号灯的平面交叉口,平面交叉出入口数量不少于3个,出入口车道数不少于双向4车道。测试车在交叉路口左转,识别交叉路口内与测试车存在路径冲突的模拟行人、非机动车或参考车,及时制动减速,避免与路径冲突目标发生碰撞。
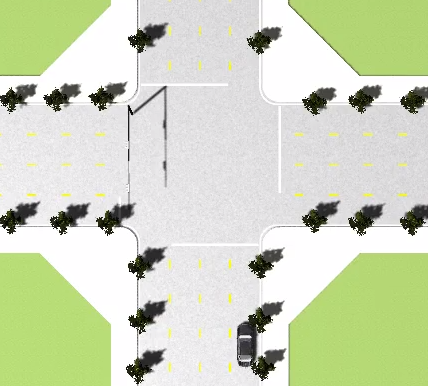
(1)测试起始状态
测试车辆处于自动驾驶状态,接近平面交叉口,执行左转。测试车持续感知交叉口内可能存在路径冲突的行人、非机动车和参考车。
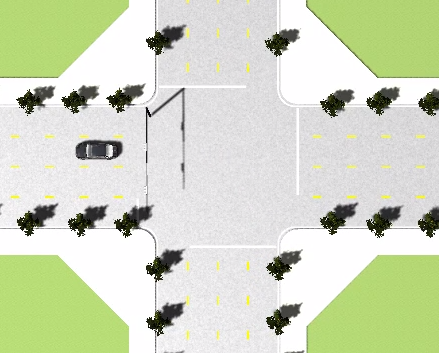
(2)测试运行过程
测试车感知交叉口内路径冲突的行人、非机动车和参考车,控制自身行驶状态,避免与目标发生碰撞。

(3)预期测试结果
测试车辆安全左转,不与行人、非机动车和参考车发生碰撞。
测试道路为具有信号灯的平面交叉口,平面交叉出入口数量不少于3个,出入口车道数不少于双向4车道。车道宽度为3.5m-3.75m,车道长度不小于100m。
测试场地内部署车载或路侧测试设备,实现对测试车辆的动、静态位置和速度精确测量。测试场地内部署测试控制中心,用于对测试车辆发送控制信号。
| 用例名称 | 道路类型 | 场景类型 | 动态示意图 | 测试过程 |
| 测试用例20.1白昼-无信号灯平面交叉口-左转自由行驶 | 城市道路环境无信号灯平面交叉口 | 无信号灯交叉口左转 | 预览 | 实例 |
| 测试用例20.2白昼-T型平面交叉口-左转避让右侧道路左转车辆 | 城市道路环境无信号灯平面交叉口 | 无信号灯交叉口左转 | 预览 | 实例 |
| 测试用例20.3白昼-T型平面交叉口-左转避让右侧道路直行车辆 | 城市道路环境无信号灯平面交叉口 | 无信号灯交叉口左转 | 预览 | 实例 |
| 测试用例20.4白昼-T型平面交叉口-左转避让左侧道路直行车辆 | 城市道路环境无信号灯平面交叉口 | 无信号灯交叉口左转 | 预览 | 实例 |
| 测试用例20.5白昼-T型平面交叉口-左转避让斜向穿越交叉口非机动车 | 城市道路环境无信号灯平面交叉口 | 无信号灯交叉口左转 | 预览 | 实例 |
