
城市道路靠路边临时停车
城市道路——直线道路(支路)
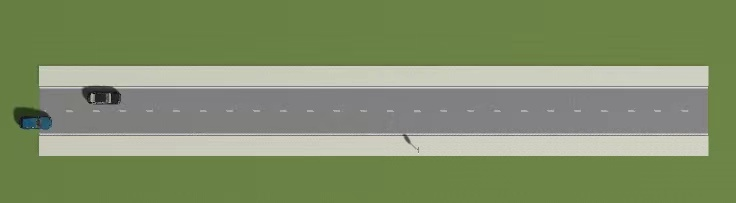
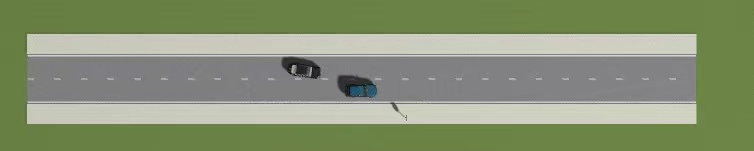
测试自动驾驶汽车能否在城市道路内准确识别路边标志牌,识别车道线,转向前提前启动转向灯,准确监测右侧相邻车道后方来车通过后,靠边停车,以确保自动驾驶汽车在城市道路内环境中正常行驶状态下的自车安全和周围环境安全。
在模拟城市道路测试环境中,测试道路为至少包含单向两车道的以上城市支路,中间车道线为白色虚线,测试车辆沿车道线行驶,实现准确识别、减速、停车或者避让操作。
(1)测试起始状态
测试车辆在自动驾驶模式下,沿车道线在城市道路中匀速行驶。
(2)测试运行过程
测试车辆在城市道路中识别到路边标志牌,识别车道线,打开闪光灯,准备进行临时靠边停车。
(3)预期测试结果
测试车辆实现安全的临时靠边停车,不与任何参考车辆碰撞。

测试道路为两侧车道线为实线的模拟城市支路城市路段,设计时速不低于40km/h,车道宽度为3.5m-3.75m,车道长度不小于300m,有一辆参考车辆。。
测试场地内部署车载或路侧测试设备,实现对测试车辆的动、静态位置和速度精确测量。测试场地内部署测试控制中心,用于向测试车辆发出控制信号。
| 用例名称 | 道路类型 | 场景类型 | 动态示意图 | 测试过程 |
| 测试用例2.36.1白昼-靠路边临时停车 | 城市道路直线道路 | 靠路边临时停车 | 预览 | 实例 |
| 测试用例2.36.2夜间-靠边临时停车 | 城市道路直线道路 | 靠路边临时停车 | 预览 | 实例 |
| 测试用例2.36.3白昼-避让后方来车-靠边停车 | 城市道路直线道路 | 靠路边临时停车 | 预览 | 实例 |
